自适应神经模糊推理结合PID控制的并联机器人控制方法

剩余2页未预览,继续预览
并联机器人控制方法
神经网络pid控制
并联机器人控制
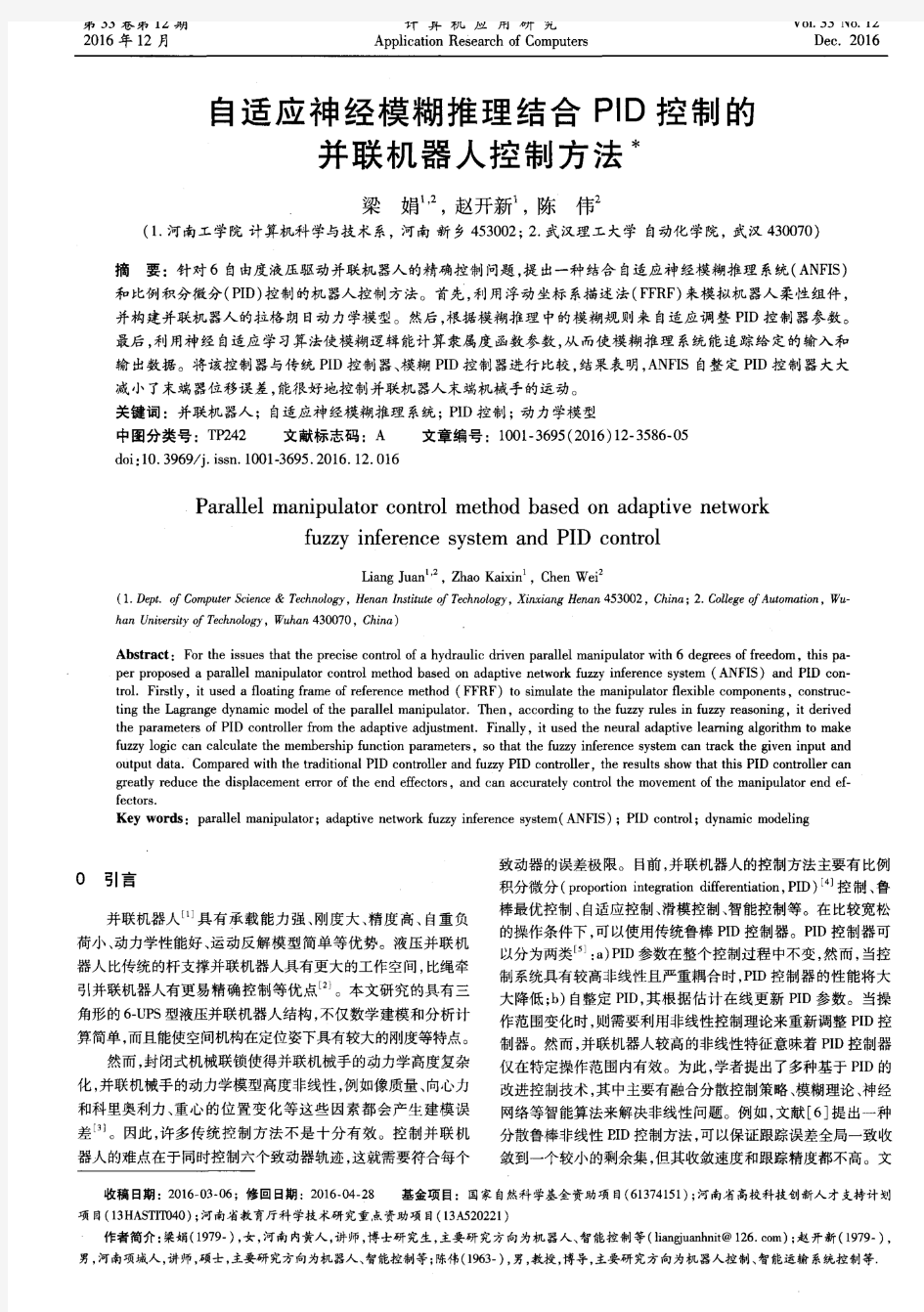
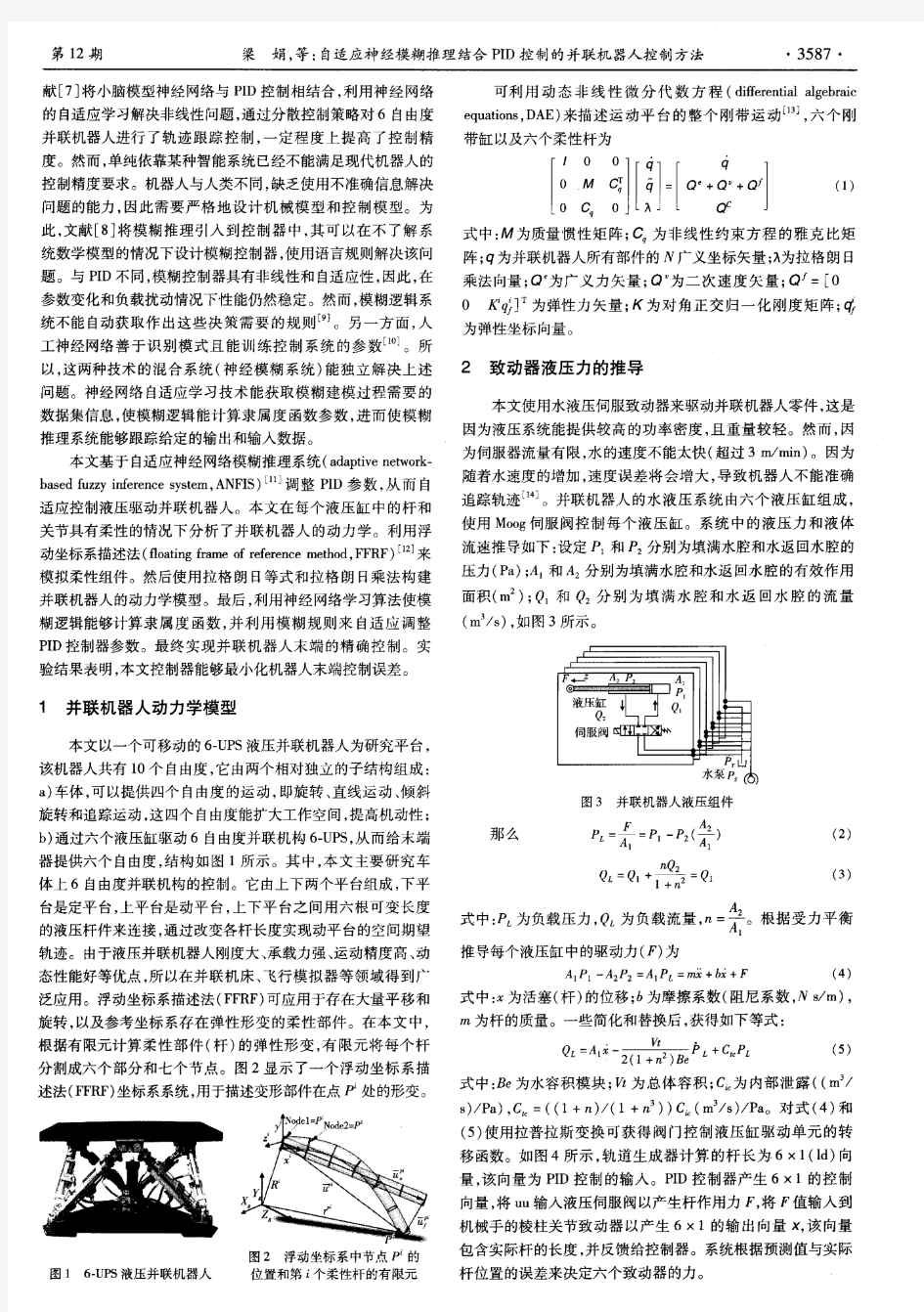
并联机器人控制系统
并联机器人运动学
随机推荐
- 2015心肺复苏(CPR)和心血管急救(ECC)指南更新要点
- 写论文注意事项
- 海牙规则中英对照37996
- 物流术语中英文对照
- 2019年航空行业回顾与2020年展望
- 高考英语全国卷2017 I 完形填空翻译与解析
- “华为杯”研究生数学建模获奖结果分析
- 2019优秀教师获奖感言3篇
- 学校教育信息化现状调研学习资料
- 企业信息化系统可行性研究报告
- 软件工程师绩效考核(细分权重)
- 2020年信息化建设企业组织架构和部门职能
- 资产评估公司的业务范围
- 2020小学信息技术六年级下册全册教案
- 七年级信息技术复习资料
- 监控室个人工作体会
- 内勤人员工作业绩考核综合标准
- XXX医院医疗质量持续改进总结
- XXXX年券商投行IPO业务量排名
- 投行基础知识汇总(财物编)
- 北京市健康体检管理办法.
- 软件工程文档规范(00007)
- 服务外包业务范围资料
- 施工现场消防演习方案
- 桥梁工程施工方案汇总
- 桥梁墩柱模板专项施工方案
- 宝安综合规划解读
- 酒店物资管理制度条例
- 物资管理情况汇报-
- 酒店员工满意度调查报告
- 2019年商场真情服务通讯稿-优秀word范文 (4页)
- 电力系统暂态分析第三版习题答案
- 北航《电力系统分析》在线作业二满分答案
- 数电读书笔记
- 电力系统分析期末复习题
- 电路分析教程(第三版)答案---燕庆明
- 电力系统分析理论第六章例6-5教学文案
- 风险管理成熟度模型(RMMM)
- 五金材料采购应用清单
- 四象限谈判模式