基于D-H模型的机器人运动学参数标定方法

剩余2页未预览,继续预览
运动学参数标定
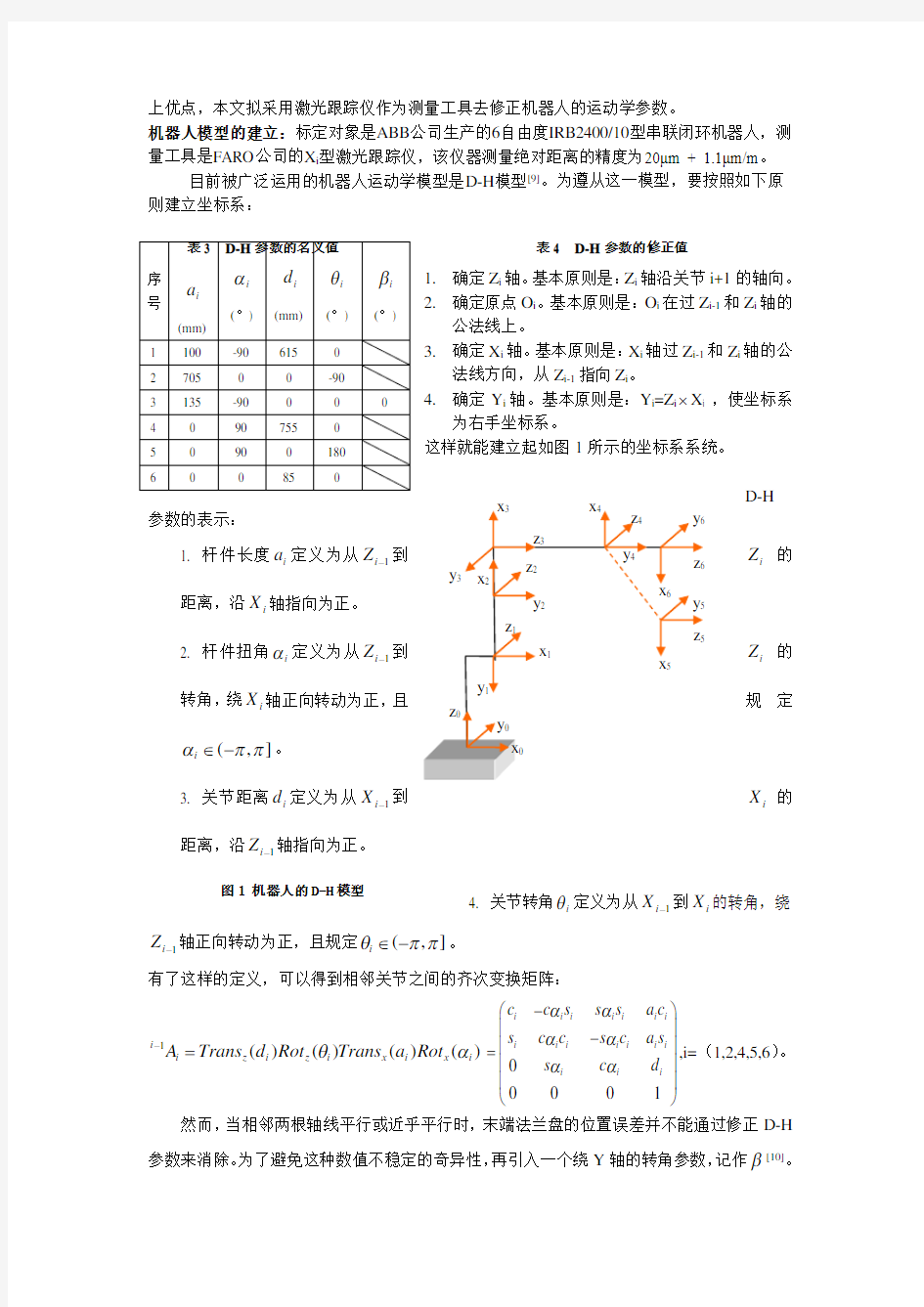
机器人运动学建模示例
机器人运动学标定综述
运动学参数
随机推荐
- 外协施工队伍管理规定
- 人力资源职业资格认证试题
- 室内门的制作方法分类、比较
- 化工厂的成本结转方法
- 预订物料控制标准流程
- 硅酸盐热工基础期末总复习题及答案
- 计量经济学第三章练习题及参考全部解答复习过程
- 热工基础 课后题答案
- 气体动力学基础试题与答案
- 莫仕公司介绍
- 耐火材料未来发展前景展望
- 学习笔记——材料基础知识
- 常用主要材料零件耐磨零件
- 如何讲好产品的故事
- 常用连接器金属材料库2013
- 细胞工程学教学大纲
- 软管泵在核电厂中的应用.docx
- 金属软管制造工艺
- 铝塑管、pe管、pp-r管三者性能比较
- 产能跟踪分析报告
- 酱卤肉制品加工实验报告范文
- 人教版四年级美术下册第一课 聚聚散散教案
- 复旦大学专用集成电路-国家重点实验室
- 超大规模集成电路的测试技术
- 超大规模集成电路用单晶硅片项目可行性研究报告立项报告模板
- 钢结构住宅施工中的常见问题及预防措施 吕印铭
- 钢结构房屋建设基本流程
- 钢结构廊架施工方案
- 基于Anycasting熔模铸造毕业设计论文
- 铸造铝合金熔炼工艺研究 廖浩然
- 减速器箱体的加工工艺设计
- 非织造布梳理机漏底加工工艺的优化
- 8嘉兴学院纺织导论第八章 非织造布的基本概念及成型原理(薛元)
- 钢结构焊接施工方案(1)
- 劣质塑料玩具危害大
- 激光焊缝跟踪系统机器人用技术手册
- 电力变压器计算单S11-250-10-0.4Dyn11二次片
- 变压器差动保护的功能及定值计算
- 电力电子的课程设计--BUCK变换器的设计
- 计算机网络实验五 RIP2路由的配置